Moteur synchrone vs asynchrone : quels impacts en usage sévère ?

Comparer un moteur synchrone à un moteur asynchrone en se limitant au rendement et au prix d’achat conduit presque toujours à une mauvaise lecture du sujet. Dès que l’application entre en service sévère, le vrai débat se déplace vers la production du couple, la localisation des pertes, la capacité à tenir thermiquement dans la durée et la cohérence entre la motorisation et son pilotage.
Deux moteurs électriques, deux logiques physiques très différentes
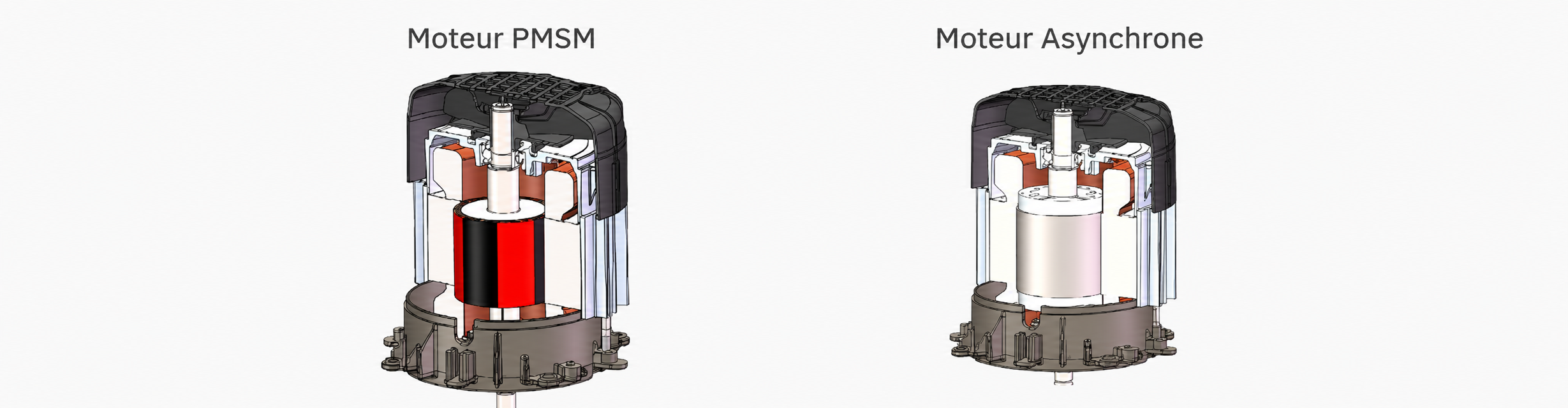
Dans la suite de cet article, le moteur synchrone désigne le moteur à aimants permanents (PMSM), aussi appelé moteur à courant continu brushless (BLDC). Le moteur asynchrone désigne le moteur à induction classique, généralement à cage.
Les deux technologies partagent un même principe de base côté stator. Des bobinages alimentés créent un champ magnétique tournant. C’est au rotor que tout change. Dans un moteur synchrone à aimants permanents, le rotor porte des aimants qui s’alignent sur le champ tournant du stator. Il tourne donc à la vitesse imposée par ce champ, sans glissement : il est Synchrone. Sur un moteur asynchrone, le rotor ne porte pas d’aimants, il intègre une cage conductrice dans laquelle le champ du stator induit des courants. Ces courants placés dans le champ magnétique du stator génèrent un effort sur le rotor qui se met en rotation. Pour que les courant induit apparaissent il faut un champ magnétique variable vu du rotor. Ce dernier ne doit donc tourner moins vite que le champ magnétique généré au rotor : le moteur est Asynchrone.
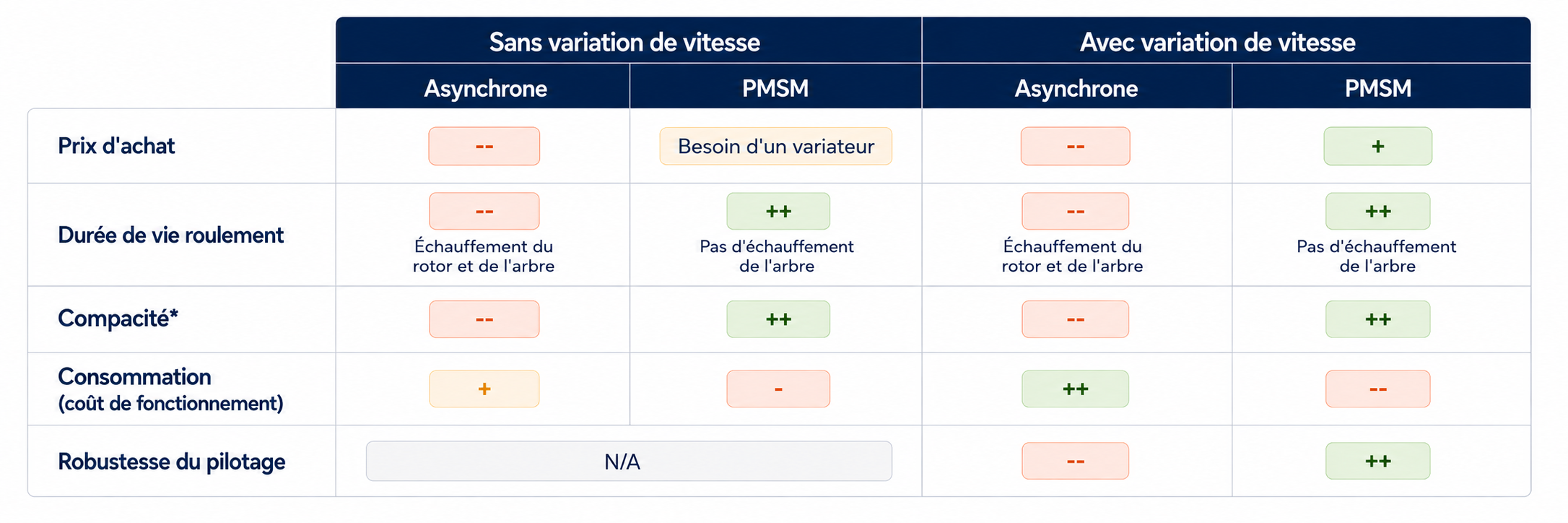
Cette différence explique une réalité d’exploitation : un moteur asynchrone est remarquablement simple à mettre en œuvre lorsqu’une application accepte une vitesse fixe. Alimenté directement sur un réseau alternatif, triphasé ou monophasé avec les bobinages et condensateurs, il démarre et fonctionne sans électronique dédiée. Sa vitesse reste alors liée à la fréquence du réseau et au nombre de pôles. C’est une solution extrêmement rationnelle dès lors que le besoin applicatif est stable.
Le moteur synchrone à aimants permanents obéit à une autre logique. Il ne se laisse pas raccorder brutalement au réseau. Pour démarrer correctement, il a besoin d’une commande électronique capable de gérer la montée en vitesse. Ce qui peut sembler une contrainte devient pourtant un avantage dès que l’application exige de la variation de vitesse. Dans ce cas, l’électronique n’est plus un coût ajouté à contrecœur, elle devient une brique native du système.
C’est un point essentiel pour éviter les comparaisons trompeuses ! Si l’usage impose déjà un pilotage fin, la supposée simplicité de l’asynchrone perd une partie de son avantage historique. Si, au contraire, l’application vit très bien à vitesse fixe et sans intelligence embarquée, l’asynchrone garde une pertinence redoutable.
En usage sévère :
L’expression “usage sévère” est souvent mal comprise car elle ne désigne pas seulement un environnement agressif. Elle recouvre aussi toutes les situations où la marge technique se resserre : fonctionnement prolongé, alternance de régimes, basse vitesse sous charge, ambiance humide ou immergée, compacité élevée, ventilation limitée, forte disponibilité requise et maintenance coûteuse.
Sur un moteur asynchrone, les pertes ne se concentrent pas qu’au stator. Le rotor participe lui aussi à la production de chaleur parce qu’il transporte des courants induits : une partie du problème thermique se situe donc dans la partie tournante, là où l’évacuation de chaleur est moins favorable que dans les parties fixes. Une partie de la chaleur produite est transmise au roulement par l’arbre ce qui va pénaliser la durée de vie de ce composant d’usure.
Pour le moteur synchrone à aimants permanents, comme le rotor ne produit pas son champ par induction, il n’y a quasi pas de courants rotoriques au sens où l’on en trouve dans un asynchrone. Le rotor chauffe donc beaucoup moins. Ce qui améliore de facto la durée de vie des roulements et le rendement du moteur. La machine conserve également davantage de marge avant d’atteindre sa limite thermique. À gabarit comparable, cela autorise plus facilement une puissance utile élevée, (ou un moteur plus compact pour une même puissance).
C’est pour cette raison qu’en usage sévère, le synchrone prend souvent l’avantage bien avant que l’on ait ouvert un tableur de coût total. Lorsqu’une application cumule vitesse variable, enveloppe compacte et contrainte thermique, la faible dissipation rotorique change la hiérarchie des solutions. Le moteur cesse d’être un composant interchangeable et devient un élément structurant de la robustesse du système.
Le bon moteur dépend de la fonction à rendre, pas d’un classement
Le moteur asynchrone reste un excellent choix dès que l’on parle d’usage simple et peu contraint. Si la machine fonctionne à vitesse fixe, si l’encombrement n’est pas critique, si le niveau thermique reste acceptable et si l’utilisateur recherche avant tout une solution économique à mettre en œuvre, il demeure difficile à battre. C’est typiquement le cas de nombreuses applications utilitaires où la fonction motorisée doit surtout être fiable, peu coûteuse et facile à raccorder.
On retrouve ce type de logique sur des usages simples de pompage ou de lavage, par exemple pour des pompes de nettoyage de cuves à lait. Lorsque la masse, le bruit, la compacité ou la variation de vitesse ne sont pas les facteurs dominants, l’asynchrone répond parfaitement au besoin.
Le synchrone à aimants permanents devient en revanche nettement plus intéressant dès que la vitesse doit être adaptée au besoin réel. L’exemple de la pompe de piscine est particulièrement parlant. L’écrémage impose ponctuellement un régime élevé, alors que le renouvellement de l’eau peut être assuré à vitesse réduite pendant des plages beaucoup plus longues. Dans cette configuration, la variation de vitesse est au cœur du bilan énergétique : une motorisation brushless pilotée permet alors d’abaisser la consommation, et d’améliorer la tenue thermique sur des cycles de fonctionnement longs.
Le raisonnement est encore plus net sur les architectures basse tension et embarquées. Dès que l’alimentation est continue, sur batterie par exemple, l’avantage de l’asynchrone branché simplement au réseau disparaît. Cela ne signifie pas qu’un asynchrone soit impossible en valeur absolue, mais qu’il perd la raison principale pour laquelle on le choisit spontanément. Dans ces conditions, le brushless s’impose souvent parce qu’il offre, au niveau de puissance visé, une meilleure densité de puissance, un meilleur rendement et une meilleure compacité. C’est ce qui explique sa présence quasi systématique dans les applications de mobilité légère, de nautisme embarqué ou de motorisations où la discrétion acoustique compte autant que la performance.
Conclusion
Le moteur asynchrone reste une réponse redoutablement pertinente pour les applications simples, fixes, économiquement serrées et peu pénalisées par la chaleur. Le moteur synchrone à aimants permanents change de catégorie dès que l’application demande de la variation de vitesse, de la compacité, de la basse tension embarquée, un rendement élevé ou une vraie marge thermique en service prolongé.


